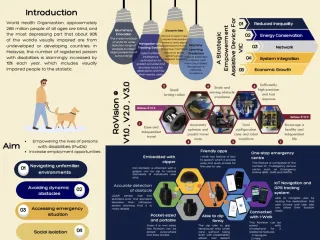
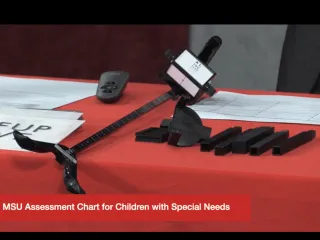
Robot imitation learning through self-exploration
Potential Commercialised
violet
Reg. ID : 16868
Comments
Description
The present invention relates to a method of imitation learning of a robotic companion through self-exploration characterised by the steps of: generating random movements of the robots body and associating the produced action with its effect perceived through vision at a reflecting means; determining primitive actions from continuous movements to comprehend visual body images; gathering resulted primitive actions to formulate an apprehension of the actions for learning bi-directional mapping between visual body images and motor actions; segmenting the actions into primitive actions using image sequences by translating the image sequences into feature vectors; clustering the changes in actions defined by the start and end of each action according to feature vector values; labelling and storing the clustered actions in the robots memory; observing a subjects action sequences; processing the observed action sequences for matching the clustered actions; and imitating the observed action sequences; wherein if the observed action sequences matches the clustered actions, the learned primitive actions is recalled; wherein if the observed action sequences does not match the clustered actions, the unmatched action sequences will be classified as a new action in the robots memory.
Contact Person/Inventor
| Name | Contact Phone | |
|---|---|---|
| Um Centre Of Innovation And Enterprise (Umcie) | umcie@um.edu.my | 013-2250151 / 03-79677351 |
Intellectual Property
| № | Type of IP | Registration ID |
|---|---|---|
| 1 | Copyright | LY2018006911 |
| 2 | Copyright | LY2018006913 |
| 3 | Copyright | LY2018006912 |
Award
| Award Title | Award Achievement | Award Year Received |
|---|---|---|
| 0 | 0 | 0 |
-
Organisation Name
- UNIVERSITY OF MALAYAUNIVERSITI MALAYA50603KUALA LUMPUR

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comment