Embedded Stiffness Control for Pneumatic System
Other
gray
Potential Commercialised
violet
Reg. ID : 17291
Comments
Description
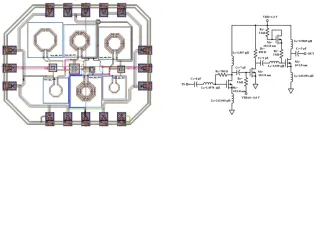
This paper presents model and controller design applications to pneumatic actuator embedded system. Two model strategies of position and force are proposed to realize compliance control for stiffness characteristic. Model of the pneumatic actuator system (transfer function) is obtained from system identification (SI) method. Next, combination of predictive functional control with observer (PFC-O) design is selected as a new control strategy for pneumatic system. Performance assessment of the controller is performed in MATLAB and validated through real-time experiments using national instrument (NI) devices and programmable system on chip (PSoC) microcontroller. Result shows that the new controller is adapted to the system and able to successfully control both simulation and real-time experiments.
Contact Person/Inventor
| Name | Contact Phone | |
|---|---|---|
| Dr. Khairuddin Osman | khairuddin.osman@utem.edu.my |
Award
| Award Title | Award Achievement | Award Year Received |
|---|---|---|
| 0 | 0 | 0 |
-
Organisation Name
- UNIVERSITI TEKNIKAL MALAYSIA MELAKAHANG TUAH JAYADURIAN TUNGGAL76100MELAKA


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comment