Topological Gaussian Aram For Simultaneous Localization And Mapping (Slam)
Potential Commercialised
violet
Reg. ID : 16864
Comments
Huraian
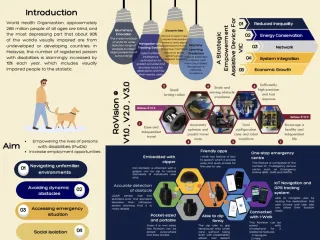
The present invention relates to a mobile robot with a controller having capable of movement in a given environment which can perform desired tasks and navigate in unstructured environments without continuous human guidance, comprising; robot module to estimate the position and posture; environment mapping module to build an environment map according to the position and posture of the robot module; mutual nesting module having navigation process based on Environmental Sciences mapping, robot localization, and path planning; topological mapping module for storing sensorial information while the robot performs navigation in the environment to track locations where the robot has already been, simply comparing the current sensorial information with those already recorded; and metric module having a metric representation of the environment where a metric map constructed based on a grid occupancy, where the grid occupancy maps the environment as an array of cells and by using at least one sensor, each cell holds a probability value to determine if the cell is occupied or unoccupied and contain information of basic geometric shapes or objects such as lines and walls.
Contact Person/Inventor
| Name | Contact Phone | |
|---|---|---|
| Um Centre Of Innovation And Enterprise (Umcie) | umcie@um.edu.my | 013-2250151 / 03-79677351 |
Intellectual Property
| № | Type of IP | Registration ID |
|---|---|---|
| 1 | Copyright | LY2019002091 |
Award
| Award Title | Award Achievement | Award Year Received |
|---|---|---|
| 0 | 0 | 0 |
-
Organisation Name
- UNIVERSITY OF MALAYAUNIVERSITI MALAYA50603KUALA LUMPUR

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Komen